Braço robótico colaborativo industrial de 6 eixos para embalagem.


Braço robótico colaborativo industrial de 6 eixos para embalagem.
Categoria principal
AGV AMR / AGV AMR com plataforma elevatória / Veículo guiado automaticamente (AGV) / Robô móvel autônomo (AMR) / Carro AGV AMR para movimentação de materiais industriais / Robô AGV de fabricante chinês / AMR para armazém / AMR com plataforma elevatória e navegação a laser SLAM / Robô móvel AGV AMR / Chassi AGV AMR com navegação a laser SLAM / Robô de logística inteligente
Aplicativo

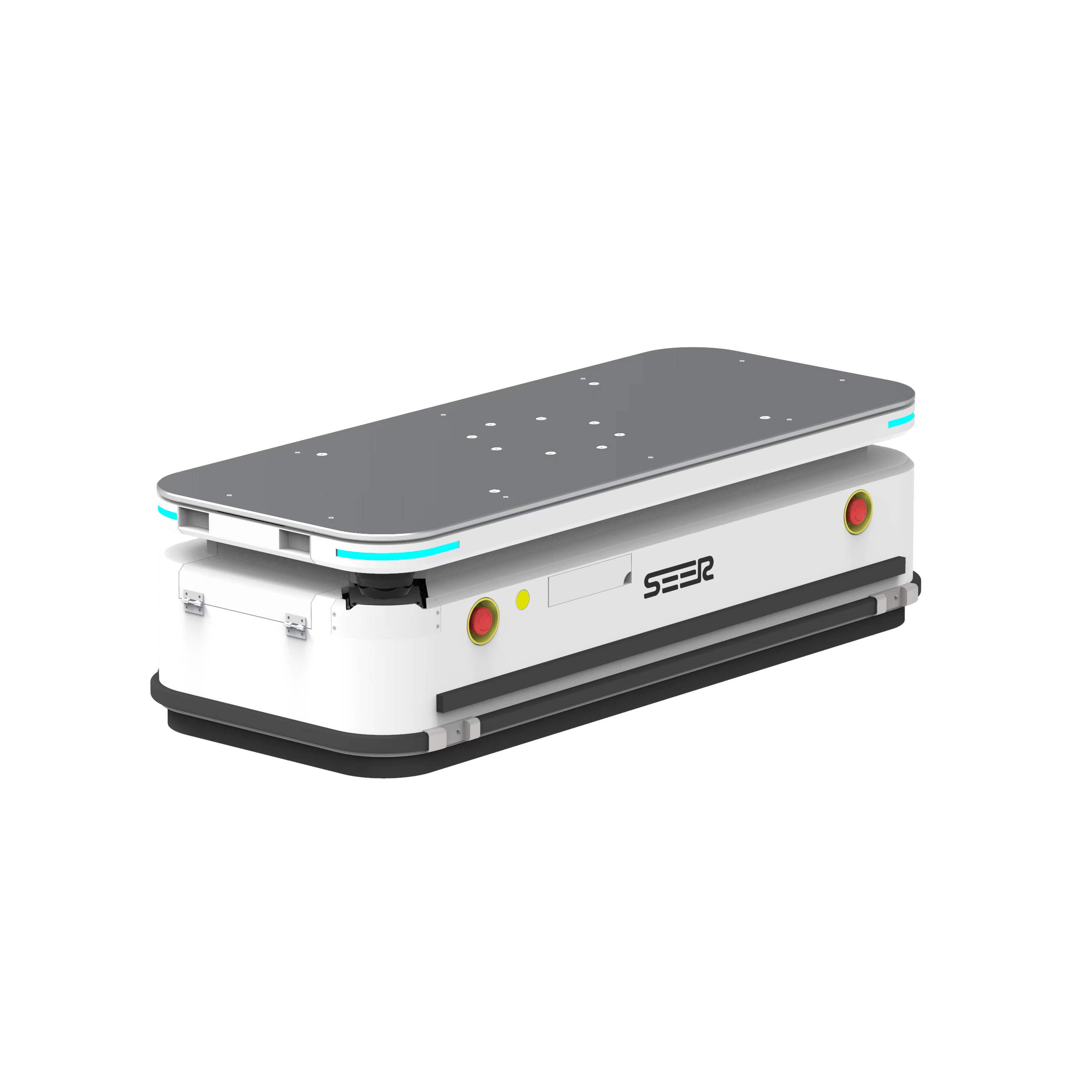
O chassi não tripulado da série AMB (Auto Mobile Base) para veículos autônomos AGV é um chassi universal projetado para esses veículos, oferecendo recursos como edição de mapas e navegação por localização. Este chassi não tripulado para carrinhos AGV possui diversas interfaces, como E/S e CAN, para a montagem de vários módulos superiores, além de um software cliente robusto e sistemas de despacho que auxiliam os usuários a concluir rapidamente a fabricação e a aplicação de veículos autônomos AGV. Quatro furos de montagem na parte superior do chassi da série AMB permitem a expansão com macacos, roletes, manipuladores, tração latente, displays, etc., possibilitando múltiplas aplicações em um único chassi. Em conjunto com a plataforma SEER Enterprise Enhanced Digitalization, a AMB permite o despacho e a implantação unificados de centenas de produtos AMB simultaneamente, o que melhora significativamente o nível de inteligência da logística interna e do transporte na fábrica.
Recurso
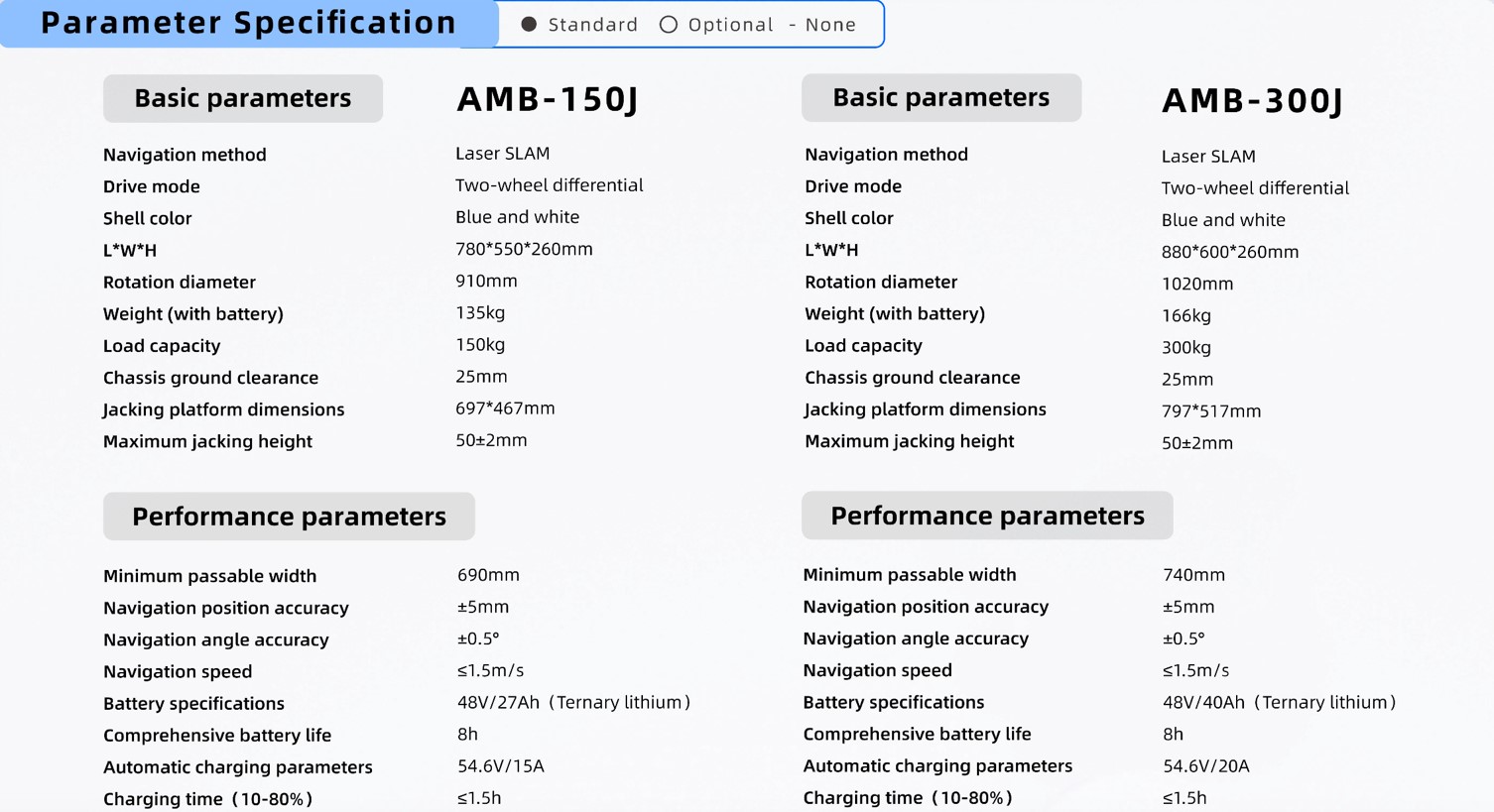
• Capacidade de carga: 150 kg e 300 kg
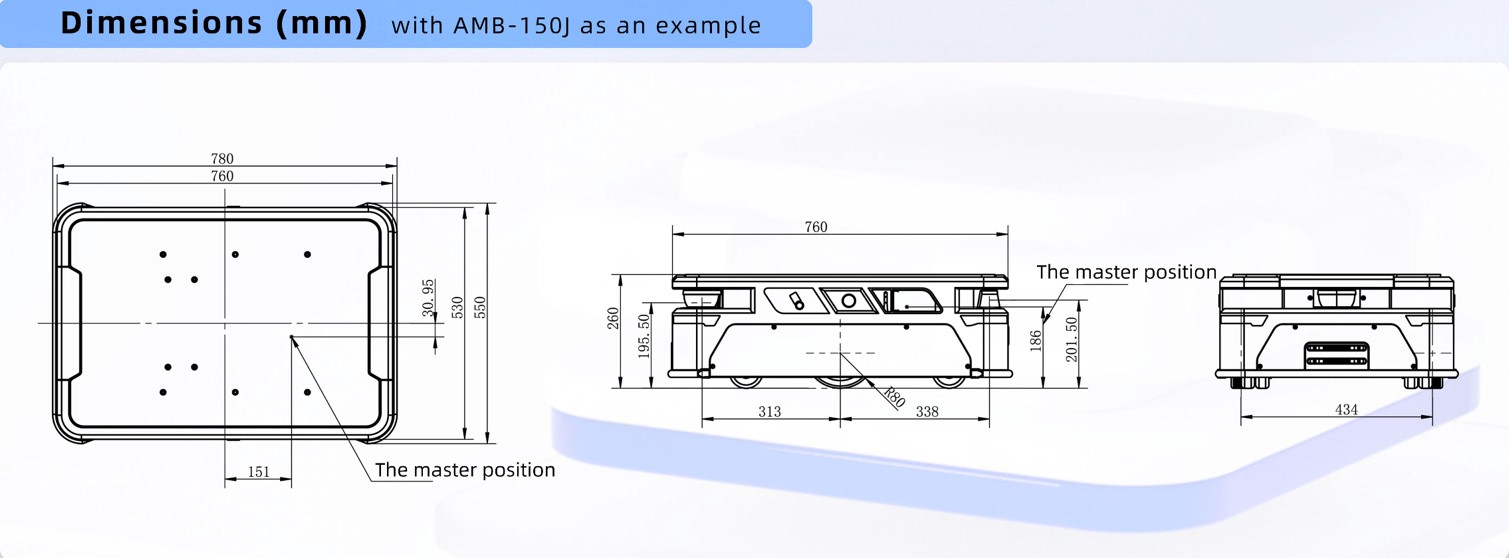
• Altura máxima de elevação: 50 mm
• Precisão da posição de navegação: ±5 mm
• Precisão do ângulo de navegação: ±0,5°
● Recursos avançados disponíveis a qualquer momento
Funcionalidades padrão abrangentes e excelentes, juntamente com recursos avançados ricos e práticos, ajudam os clientes a alcançar facilmente uma logística inteligente.
● Plataformas com múltiplas especificações disponíveis para expansão
Fornece plataformas de 150 kg e 300 kg para atender às necessidades de carga e de diferentes cenários em diversos setores. Também pode ser utilizada com manipuladores, roletes, macacos hidráulicos, tração latente, panorâmica/inclinação, tela de exibição, etc., para viabilizar múltiplas aplicações com um único chassi.
● ±5 mm, eficiente e preciso
O algoritmo Laser SLAM é utilizado para alcançar uma localização de alta precisão, com a acurácia de localização repetida do laser não refletivo dentro de ±5 mm, permitindo a acoplagem perfeita entre robôs móveis e humanos, e o fluxo eficiente de cargas entre diversos pontos. Nota: Os valores reais dependem das condições ambientais.
● Navegação estável para segurança e confiabilidade
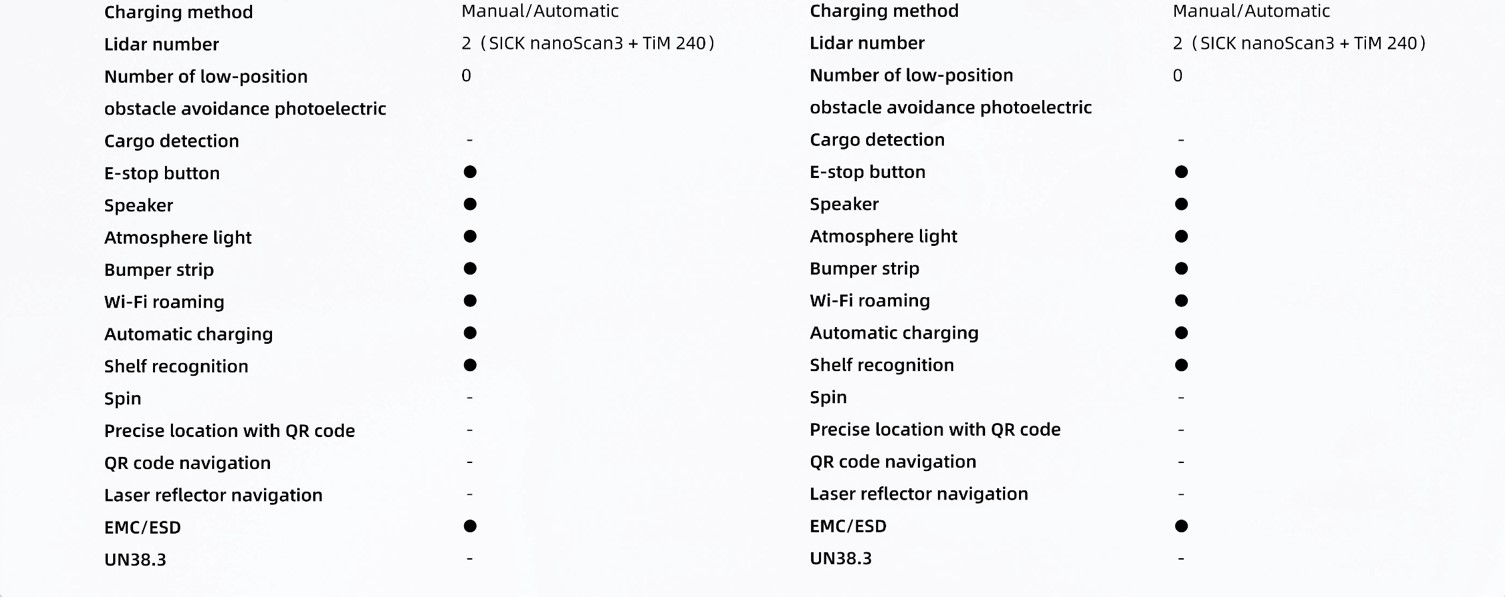
A navegação por SLAM a laser, a navegação por refletor a laser, a navegação por código QR e outros métodos de navegação são perfeitamente integrados e alternados de forma transparente para garantir o funcionamento estável do robô móvel.
● Implantação fácil e gestão visível
Uma gama completa de softwares e sistemas digitais de suporte permite realizar facilmente a operação, o agendamento e o gerenciamento de informações de robôs móveis, além de se conectar perfeitamente ao sistema MES da fábrica para concretizar a logística inteligente.
Produtos relacionados



Parâmetro de especificação
Nosso negócio


Categorias de produtos
-

Máquina de solda automática de 6 eixos Lh1850-B-6 em...
-

Navegação a laser inteligente de 1000 kg com sistema elétrico automático...
-

Braço robótico de 6 eixos, braço robótico industrial, robô A...
-
Máquina de soldagem robótica industrial automática Ar...
-

Braço robótico industrial de 6 eixos Szgh-I5 Colaborativo...
-
Montagem, paletização, polimento e pulverização a baixo custo...