SÉRIE DE TROCA RÁPIDA – QCA-50 Um dispositivo de troca rápida na extremidade de um robô



Categoria principal
Trocador de Ferramentas para Robôs / Trocador de Ferramentas de Fim de Braço (EOAT) / Sistema de Troca Rápida / Trocador Automático de Ferramentas / Interface de Ferramentas Robóticas / Lado do Robô / Lado da Garra / Flexibilidade de Ferramentas / Liberação Rápida / Trocador de Ferramentas Pneumático / Trocador de Ferramentas Elétrico / Trocador de Ferramentas Hidráulico / Trocador de Ferramentas de Precisão / Mecanismo de Travamento de Segurança / Efetor Final / Automação / Eficiência na Troca de Ferramentas / Troca de Ferramentas / Automação Industrial / Ferramentas de Fim de Braço Robóticas / Design Modular
Aplicativo
As ferramentas de fim de braço (EOAT, na sigla em inglês) são amplamente utilizadas em indústrias como a automotiva, eletrônica 3C, logística, moldagem por injeção, embalagens de alimentos e produtos farmacêuticos e processamento de metais. Suas principais funções incluem manuseio de peças, soldagem, pulverização, inspeção e troca rápida de ferramentas. As EOAT aumentam significativamente a eficiência da produção, a flexibilidade e a qualidade do produto, tornando-se uma parte essencial da automação industrial moderna.
Recurso
Alta precisão
O mecanismo de ajuste do pistão na lateral da garra desempenha a função de posicionamento, proporcionando alta precisão de posicionamento repetitivo. Testes com um milhão de ciclos demonstram que a precisão real é muito superior ao valor recomendado.
Alta resistência
O pistão de travamento com grande diâmetro do cilindro possui forte força de travamento, e o dispositivo de travamento rápido da extremidade do robô SCIC apresenta alta capacidade antitorque. Durante o travamento, não haverá vibração devido ao movimento em alta velocidade, evitando falhas de travamento e garantindo precisão de posicionamento repetida.
Alto desempenho
O mecanismo de travamento com design de superfície multicônica, componentes de vedação de longa duração e sonda de contato elástica de alta qualidade são adotados para garantir o contato firme do módulo de sinal.



Parâmetro de especificação
| Série Quick Changer | ||||
| Modelo | Carga útil máxima | Caminho do gás | Força de travamento a 80 psi (5,5 bar) | Peso do produto |
| QCA-05 | 5kg | 6-M5 | 620N | 0,4 kg |
| QCA-05 | 5kg | 6-M5 | 620N | 0,3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0,3 kg |
| QCA-25 | 25 kg | 12-M5 | 2400N | 1,0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1,4 kg |
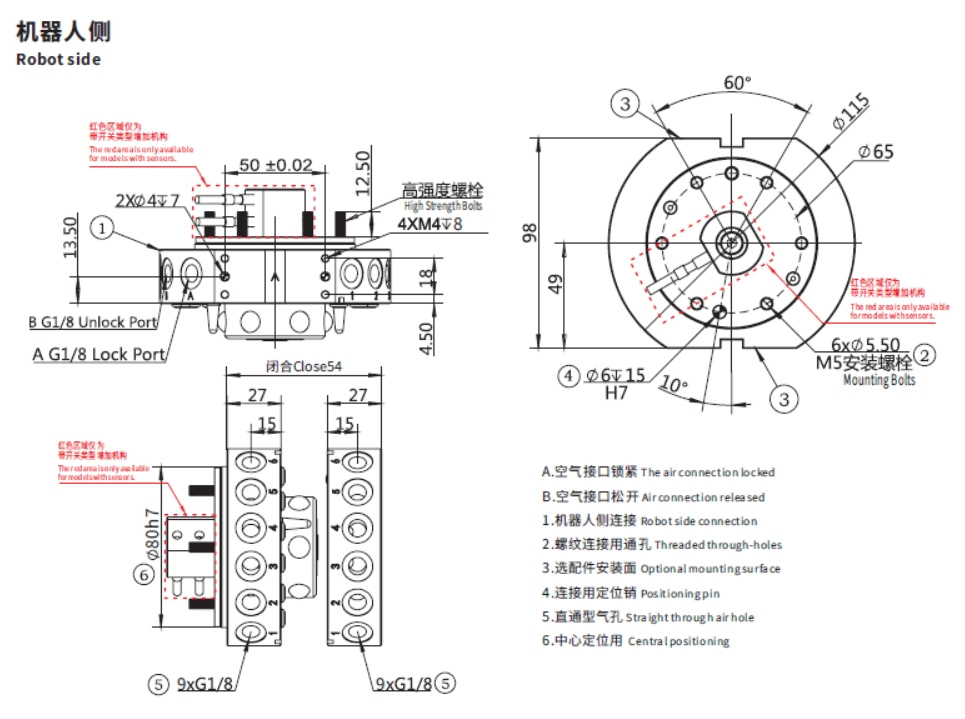
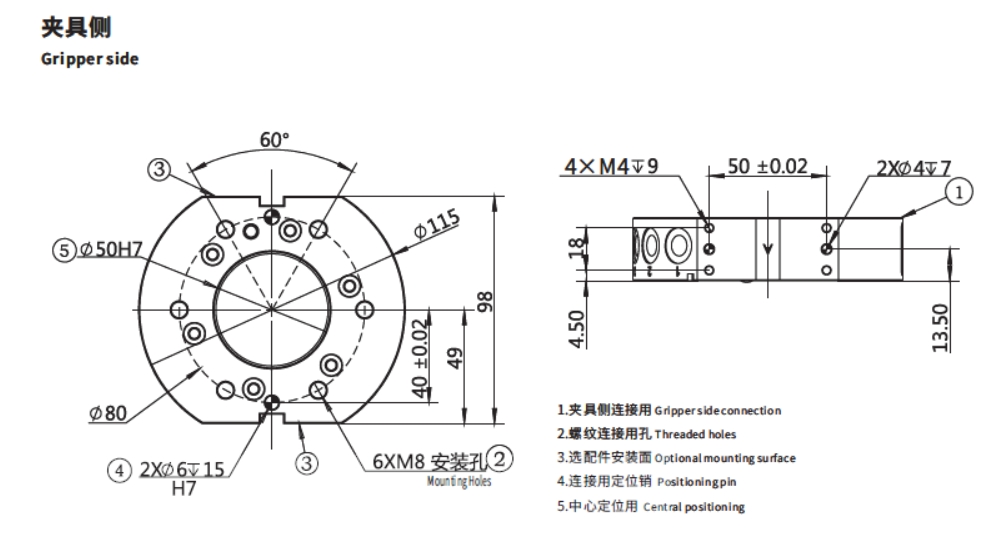
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1,7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1,9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000N | 5,2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000N | 3,7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000N | 6,2 kg |
| QCA-200 | 300 kg | 12-G3/8 | 16000N | 9,0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000N | 9,0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9,4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23,4 kg |

Lado do robô

Lado da garra

Interruptor da alça lateral do robô
Módulo aplicável
Tipo de módulo
| Nome do produto | Modelo | PN | Tensão de trabalho | Corrente de trabalho | Conector | Conector PN |
| Módulo de sinalização lateral do robô | QCSM-15R2 | 7.Y00468 | 24V | 2,5A | D-Sub15R2-1000① | 1.Y10080 |
| Módulo de sinal lateral da garra | QCSM-15G2 | 7.Y00469 | 24V | 2,5A | D-Sub15G2-1000① | 1.Y10081 |
| Módulo de sinalização lateral do robô | QCSM-08R | 7.Y00477 | 380V | 30A | 3108A22-23S② | 1.Y10710 |
| Módulo de sinal lateral da garra | QCSM-08G | 7.Y00478 | 380V | 30A | 3108A22-23P② | 1.Y10711 |
| Módulo de sinalização lateral do robô | QCSM-19R | 7.Y00954 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Módulo de sinalização lateral do robô | QCSM-19R | 7.Y00954 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Módulo de sinalização lateral do robô | QCSM-19R1 | 7.Y02123 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Módulo de sinalização lateral do robô | QCSM-19R1 | 7.Y02123 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Módulo de sinal lateral da garra | QCSM-19G | 7.Y00955 | 220V | 3A | MS3116F14-19P/-Y② | 1.Y11419 |
| Módulo de sinal lateral da garra | QCSM-19G | 7.Y00955 | 220V | 3A | CMB08E-14-19P(072)SR-B② | 1.Y11864 |
| Módulo de sinalização lateral do robô | QCSM-26R | 7.Y00464 | 220V | 3A | MS3116F16-26S/-Y② | 1.Y11867 |
| Módulo de sinalização lateral do robô | QCSM-26R | 7.Y00464 | 220V | 3A | CMB08E-16-26S(072)SR-B② | 1.Y11865 |
| Módulo de sinal lateral da garra | QCSM-26G | 7.Y00465 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Módulo de sinal lateral da garra | QCSM-26G | 7.Y00465 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Módulo de sinal lateral da garra | QCSM-21/26G | 7.Y02117 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Módulo de sinal lateral da garra | QCSM-21/26G | 7.Y02117 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Módulo de sinalização lateral do robô | QCSM-32R | 7.Y02095 | 220V | 3A | MS3116F22-36S② | 1.Y13392 |
| Módulo de sinalização lateral do robô | QCSM-32R | 7.Y02095 | 220V | 3A | MS3118F22-36S② | 1.Y13393 |
| Módulo de sinal lateral da garra | QCSM-32G | 7.Y02096 | 220V | 3A | MS3116F22-36P② | 1.Y13394 |
| Módulo de sinal lateral da garra | QCSM-32G | 7.Y02096 | 220V | 3A | MS3118F22-36P② | 1.Y13395 |
① O cabo tem 1 metro de comprimento. ② Apenas a emenda, sem fio.
Módulo de extensão pneumática
| Nome do produto | Modelo | PN | Caminho do Gás | Furo roscado |
| Módulo de extensão pneumática lateral do robô | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Módulo de extensão pneumática lateral da garra | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Módulo de extensão pneumática lateral do robô | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Módulo de extensão pneumática lateral da garra | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Módulo de extensão pneumática lateral do robô | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Módulo de extensão pneumática lateral da garra | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Módulo de extensão pneumática lateral do robô | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Módulo de extensão pneumática lateral da garra | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Módulo de extensão pneumática autoproclamado pelo robô | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Módulo de extensão pneumático autoproclamado no lado da garra | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| Módulo de extensão pneumática lateral do robô | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Módulo de extensão pneumática lateral da garra | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Tipo de módulo de alta frequência
| Nome do produto | Modelo | PN | Tensão de trabalho | Corrente de trabalho |
| Módulo de Sinalização Lateral do Robô | QCHFM-E14-C1R | 7.Y02003 | 1,4 kV | 5A |
| Módulo de Sinalização Lateral da Garra | QCHFM-E14-C1G | 7.Y02004 | 1,4 kV | 5A |
Módulo de sinal (interface de cabo de rede)
| Nome do produto | Modelo | PN |
| Módulo de sinalização lateral do robô | QCSM-RJ45-06R | 7.Y02007 |
| Módulo de sinal lateral da garra | QCSM-RJ45-06G | 7.Y02008 |
Módulo de Potência Servo
| Nome do produto | Modelo | PN |
| módulo de servoalimentação lateral do robô | QCSM-08R1 | 7.Y02080 |
| Módulo de alimentação servo lateral da garra | QCSM-08G1 | 7.Y02081 |
Módulo de sinal servo
| Nome do produto | Modelo | PN |
| módulo de sinal servo lateral do robô | QCSM-12R | 7.Y02082 |
| Módulo de sinal servo lateral da garra | QCSM-12G | 7.Y02083 |
Módulo de ar fluido autovedante
| Nome do produto | Modelo | PN |
| Módulo de sinalização lateral do robô | QCWM-02R | 7.Y02049 |
| Módulo de sinal lateral da garra | QCWM-02G | 7.Y02050 |
Nosso negócio







