SCARA ROBOTIC ARMS – Braço Robótico Colaborativo Z-Arm-4160B





Categoria principal
Braço robótico industrial / Braço robótico colaborativo / Garra elétrica / Atuador inteligente / Soluções de automação
Aplicativo
Os robôs colaborativos SCIC Z-Arm são leves, possuem 4 eixos e um motor de acionamento integrado, dispensando o uso de redutores como os robôs SCARA tradicionais e reduzindo os custos em 40%. Os SCIC Z-Arm podem realizar funções como impressão 3D, manuseio de materiais, soldagem e gravação a laser, entre outras. Eles são capazes de aumentar significativamente a eficiência e a flexibilidade do seu trabalho e produção.
Características

Alta precisão
Repetibilidade
±0,02 mm
Eixo Z personalizado
0,1-0,8m
Carga útil grande
Suporte 4kg
Máximo 5 kg
Velocidade mais alta
Velocidade linear máxima de 2 m/s
(Carga máxima de 5 kg)
Braço robótico de 4 eixos com grande envergadura e alta precisão, fácil de usar.
Alta precisão
Repetibilidade: ±0,02 mm
Grande envergadura
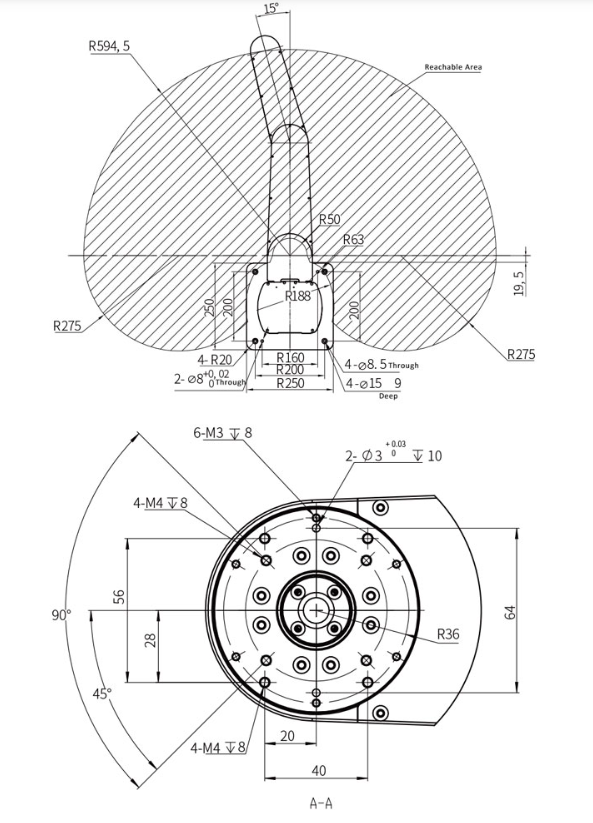
Eixo J1: 325 mm,Eixo J2: 275 mm
Eixo Z personalizado
O curso de subida e descida pode ser personalizado entre 0,1 m e 0,8 m.
Economia de espaço
O controlador/driver é integrado.
Simples e fácil de usar.
Até mesmo um iniciante que não conhece braços robóticos pode usá-los facilmente, pois a interface é intuitiva.
Alta velocidade
Sua velocidade é de 2000 mm/s sob uma carga de 4 kg.

Produtos relacionados



Parâmetro de especificação
O SCIC Hitbot Z-Arm 4160B, projetado pela SCIC Tech, é um robô colaborativo leve, fácil de programar e usar, com suporte a SDK. Além disso, possui detecção de colisão, ou seja, para automaticamente ao tocar em uma pessoa, o que proporciona uma colaboração inteligente entre humanos e máquinas, garantindo alta segurança.
| Braço robótico colaborativo Z-Arm 4160B | Parâmetros |
| 1 comprimento do braço do eixo | 325 mm |
| ângulo de rotação de 1 eixo | ±90° |
| Comprimento do braço de 2 eixos | 275 mm |
| ângulo de rotação de 2 eixos | ±164° Opcional: 15-345° |
| Curso do eixo Z | 410 A altura pode ser personalizada. |
| faixa de rotação do eixo R | ±1080° |
| Velocidade linear | 2000 mm/s (carga útil de 4 kg) |
| Repetibilidade | ±0,02 mm |
| Carga útil padrão | 4kg |
| carga útil máxima | 5kg |
| Grau de liberdade | 4 |
| Fonte de energia | Adaptável a 220V/110V 50-60Hz para potência de pico de 48VDC 960W |
| Comunicação | Ethernet |
| Expansibilidade | O controlador de movimento integrado oferece 24 entradas/saídas + expansão sob o braço. |
| O eixo Z pode ser personalizado em altura. | 0,1 m ~ 0,8 m |
| Ensino de arrastar no eixo Z | / |
| Interface elétrica reservada | Configuração padrão: fios 24*23 AWG (sem blindagem) do painel de tomadas através da tampa do braço inferior. Opcional: 2 tubos de vácuo φ4 através do painel de soquetes e flange. |
| Garras elétricas HITBOT compatíveis | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Luz respiratória | / |
| Amplitude de movimento do segundo braço | Padrão: ±164° Opcional: 15-345° |
| Acessórios opcionais | / |
| Ambiente de uso | Temperatura ambiente: 0-45°C Umidade: 20-80% UR (sem risco de geada) |
| Entrada digital de porta de E/S (isolada) | 9+3+extensão do antebraço (opcional) |
| Saída digital da porta de E/S (isolada) | 9+3+extensão do antebraço (opcional) |
| Entrada analógica da porta de E/S (4-20mA) | / |
| Saída analógica da porta de E/S (4-20mA) | / |
| altura do braço do robô | 860 mm |
| peso do braço robótico | Curso de 410 mm, peso líquido de 36,5 kg |
| Tamanho da base | 250 mm * 250 mm * 15 mm |
| Distância entre os furos de fixação da base | 200 mm x 200 mm com quatro parafusos M8 x 20 |
| Detecção de colisão | √ |
| Ensinando a arrastar | √ |
Ideal para tarefas de montagem leves.
O Z-Arm XX60B é um braço robótico de 4 eixos com grande envergadura, ocupando uma área pequena, muito adequado para ser colocado em bancadas de trabalho ou dentro de máquinas, sendo uma escolha ideal para tarefas de montagem leves.


Leve e com amplo ângulo de rotação.

O produto pesa cerca de 36,5 kg, sua carga máxima pode chegar a 5 kg, o ângulo de rotação do eixo 1 é de ±90°, o ângulo de rotação do eixo 2 é de ±164° e a faixa de rotação do eixo R pode chegar a ±1080°.
Grande envergadura, ampla aplicação

O braço Z XX60B possui uma longa envergadura, com 325 mm de comprimento no eixo 1 e 275 mm no eixo 2, e sua velocidade linear pode chegar a 2000 mm/s sob uma carga de 4 kg.


Flexibilidade de implementação, rapidez de transição.
O braço Z XX60B possui características como leveza, economia de espaço e flexibilidade de implantação, sendo adequado para diversas aplicações, sem alterar o layout de produção anterior, permitindo rápida troca de sequência de processos e produção de pequenos lotes, entre outras possibilidades.
DragTeaching para concluir o programa

O software é baseado em design gráfico e oferece módulos funcionais básicos como ponto, sinal de saída, garra elétrica, bandeja, atraso, subprocesso, reinicialização e outros. Os usuários podem arrastar os módulos para controlar o braço robótico na área de programação. A interface é simples, mas as funções são poderosas.
Alcance de movimento M1 (Girar para fora)
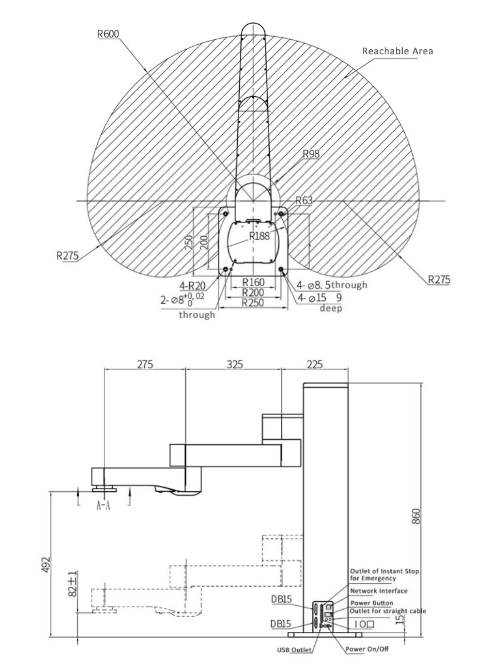
Recomendação para o conector DB15

Modelo recomendado: Macho banhado a ouro com revestimento em ABS YL-SCD-15M; Fêmea banhada a ouro com revestimento em ABS YL-SCD-15F
Dimensões: 55 mm * 43 mm * 16 mm
(Consulte a Figura 5)
Diagrama do ambiente de uso externo do braço robótico

Nosso negócio


Categorias de produtos
-

SÉRIE DE TROCA RÁPIDA – QC-150 Manual Redondo...
-

ROBÔS DE ELEVAÇÃO – Robô de Elevação Rotativa SJV...
-

EMPILHADEIRA INTELIGENTE – SFL-CDD14-CE Laser SLAM ...
-

SÉRIE DE COBOT DE IA TM – TM12M Cobot de IA de 6 Eixos
-

SÉRIE DE COBOT DE IA TM – TM16M Cobot de IA de 6 Eixos
-

SÉRIE DE GARRAS ELÉTRICAS HITBOT - Z-EFG-30 Paral...