HITBOT SÉRIE DE GARRAS ELÉTRICAS – Z-EFG-40-100 Garra Elétrica Tipo Larga



Categoria principal
Braço robótico industrial / Braço robótico colaborativo / Garra elétrica / Atuador inteligente / Soluções de automação
Aplicativo
As garras robóticas da série Z-EFG da SCIC são compactas e possuem um sistema servo integrado, o que permite um controle preciso de velocidade, posição e força de fixação. O sistema de garras de última geração da SCIC para soluções de automação abrirá novas possibilidades para automatizar tarefas que você jamais imaginou serem possíveis.

Recurso

• Grande força de fixação, travamento mecânico autotravante
• Curso ajustável, força de fixação ajustável
·Longa vida útil: dezenas de milhões de ciclos, superando as garras de ar.
Controlador integrado: tamanho compacto, fácil integração.
·Modo de controle: 485 (Modbus RTU), E/S
Curso de 40 mm, força de fixação de 100 N, travamento mecânico automático, sem queda após desligamento.
Grande derrame
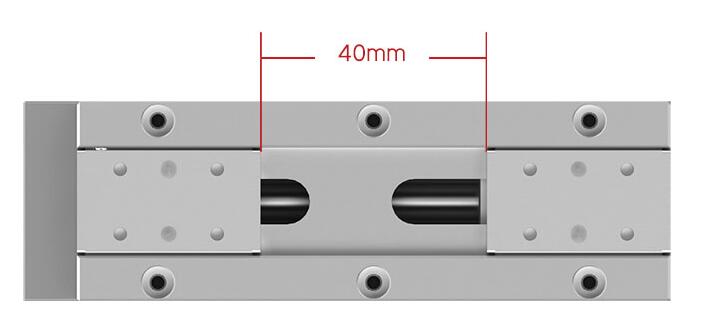
O curso total é ajustável em 40 mm.
Força de aperto
40-100 N, peso de fixação recomendado ≤ 1 kg
Travamento automático mecânico
Travamento mecânico automático, sem descida mesmo com a energia desligada.
O controlador está integrado.
Quarto pequeno com cobertura conveniente para integrar.
Reação rápida
O menor tempo de um único golpe é de apenas 0,4s.
Longa vida
Dezenas de milhões de ciclos, além do alcance do compressor de ar.

● Promovendo uma revolução na substituição de garras pneumáticas por garras elétricas, a primeira garra elétrica com sistema servo integrado na China.
● Substituição perfeita para compressor de ar + filtro + válvula solenoide + válvula de aceleração + garra pneumática
● Vida útil de múltiplos ciclos, consistente com os cilindros tradicionais japoneses.



Parâmetro de especificação
| Modelo nº Z-EFG-40-100 | Parâmetros |
| AVC total | Ajustável em 40 mm |
| força de preensão | Ajustável de 40 a 100 N |
| Repetibilidade | ±0,02 mm |
| Peso de preensão recomendado | ≤1kg |
| Modo de transmissão | Cremalheira + Guia esférica |
| Reposição de graxa em componentes móveis | A cada seis meses ou 1 milhão de movimentos/tempo |
| tempo de movimento de batimento unidirecional | 0,4s |
| Modo de movimento | Dois dedos se movem horizontalmente |
| Peso | 1kg |
| Dimensões (C*L*A) | 85*37*120mm |
| Tensão de operação | 24V±10% |
| Corrente nominal | 0,5A |
| Corrente de pico | 4A |
| Poder | 12W |
| Classe de proteção | IP20 |
| Tipo de motor | DC sem escovas |
| Faixa de temperatura operacional | 5-55℃ |
| Faixa de umidade operacional | RH35-80 (Sem geada) |
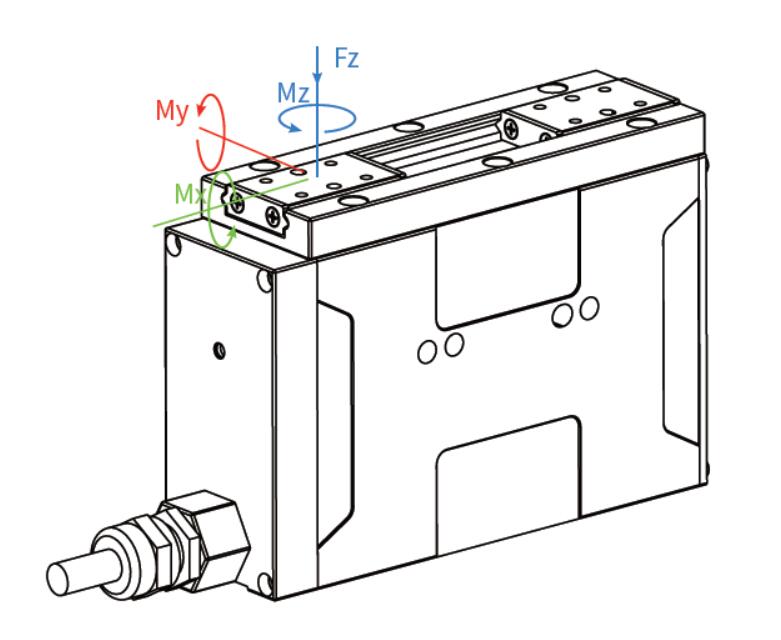
| Carga estática admissível na direção vertical | |
| Fz: | 200N |
| Torque admissível | |
| Mx: | 8 Nm |
| Meu: | 6,1 Nm |
| Mz: | 6,1 Nm |
Controle de força preciso, alta repetibilidade

A garra elétrica Z-EFG-40-100 adota um design de transmissão especial e compensação de algoritmo de acionamento, com curso total de 40 mm, força de fixação de 40 a 100 N, curso e força ajustáveis e repetibilidade de ±0,02 mm.

Reação rápida, mais rápido e estável.

A garra elétrica adota o modo de transmissão por haste helicoidal + correia dentada + guia de esferas, com um tempo mínimo de curso de apenas 0,4s, o que atende às necessidades de fixação em linhas de produção.
Ocupando uma área pequena, fácil de integrar.

A garra elétrica adota um design de 2 dedos paralelos, com dimensões de 85 mm (comprimento) x 37 mm (largura) x 120 mm (altura). Sua estrutura compacta suporta mais de 5 modos de instalação e seu controlador é integrado, ocupando pouco espaço e facilitando a execução de diversas tarefas de fixação.


Acionamento e controlador integrados com fixação suave

A extremidade da garra Z-EFG-40-100 pode ser facilmente trocada, sua capacidade de fixação é de ≤1kg, e o cliente pode projetar as peças da extremidade de acordo com os objetos a serem fixados, garantindo que a garra elétrica execute a tarefa de fixação da maneira mais eficiente possível.
Múltiplos modos de controle, fácil de operar.

A configuração da garra elétrica Z-EFG-40-100 é simples e possui diversos modos de controle, incluindo 485 (Modbus RTU), Pulso e E/S, sendo compatível com o sistema de controle principal PLC.

Deslocamento do centro de gravidade da carga
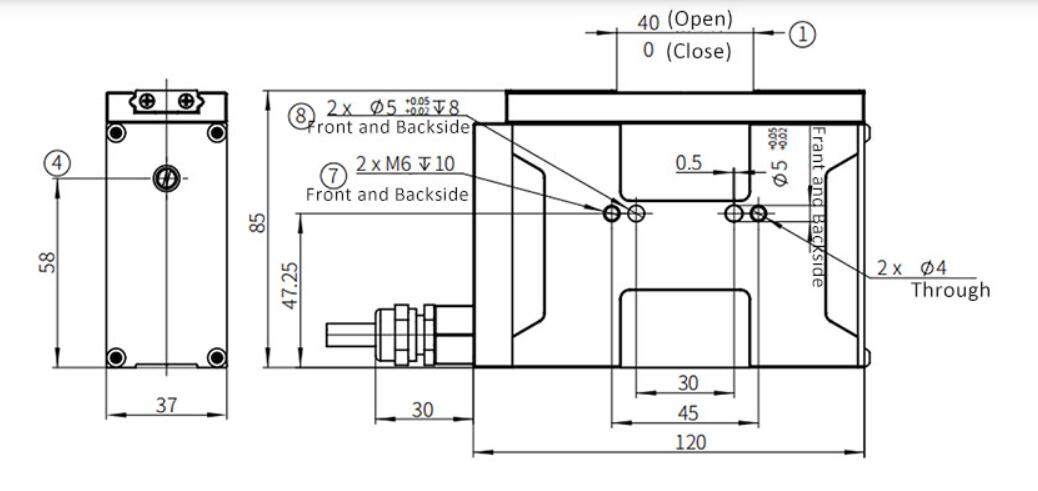
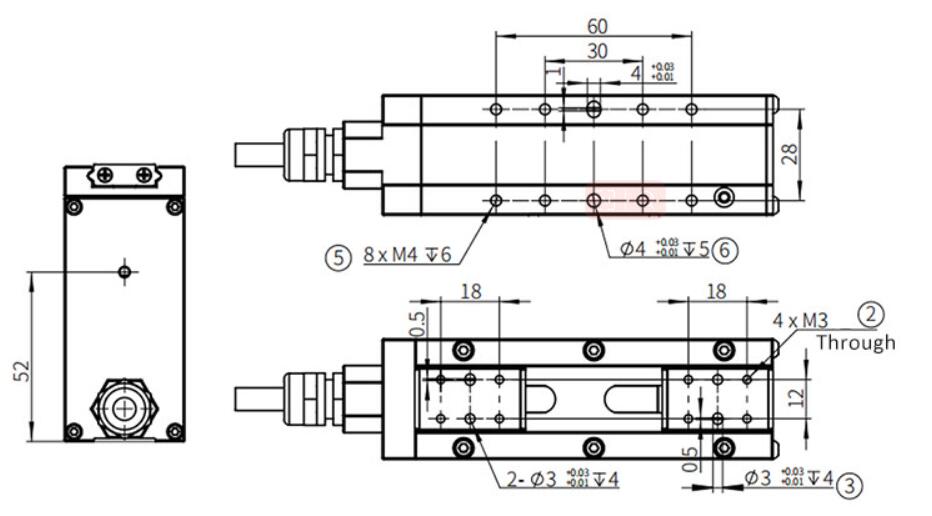
1) O curso da garra elétrica
2) Local de instalação (furo roscado)
3) Local de Instalação (Furo de Pino)
4) Posição de abertura e fechamento da mão
5) Local de instalação inferior (furo roscado)
6) Local de instalação inferior (furo do pino)
7) Local de Instalação Lateral (Furo de Pino)
8) Local de Instalação Lateral (Furo Roscado)
Nosso negócio







