Série de garras elétricas HITBOT – Z-EFG-R Garra elétrica colaborativa



Categoria principal
Braço robótico industrial / Braço robótico colaborativo / Garra elétrica / Atuador inteligente / Soluções de automação
Aplicativo
As garras robóticas da série Z-EFG da SCIC são compactas e possuem um sistema servo integrado, o que permite um controle preciso de velocidade, posição e força de fixação. O sistema de garras de última geração da SCIC para soluções de automação abrirá novas possibilidades para automatizar tarefas que você jamais imaginou serem possíveis.

Recurso

·Uma garra elétrica com servomotor pequeno, porém potente.
·Os terminais podem ser substituídos para atender a diferentes requisitos de projeto.
·Capaz de pegar objetos frágeis e deformáveis, como ovos, tubos de ensaio, anéis, etc.
·Adequado para ambientes sem fontes de ar (como laboratórios e hospitais).
Sistema Servo Integrado Aplicado a Diversas Solicitações
Grande força de fixação
Força de aperto: 80 N,
Curso: 20 mm
Controle de Precisão
Repetibilidade: ±0,02 mm
Plug and Play
Projetado especialmente paragarra elétrica de seis eixos
O controlador é integrado.
Revestindo uma área pequena, fácil de integrar.
A cauda pode ser alterada.
Sua cauda pode ser modificada para atender a diversas solicitações.
Fixação suave
Ele pode prender objetos frágeis.

● Promovendo uma revolução na substituição de garras pneumáticas por garras elétricas, a primeira garra elétrica com sistema servo integrado na China.
● Substituição perfeita para compressor de ar + filtro + válvula solenoide + válvula de aceleração + garra pneumática
● Vida útil de múltiplos ciclos, consistente com os cilindros tradicionais japoneses.




Parâmetro de especificação
O Z-EFG-R é uma garra robótica elétrica com controlador integrado e múltiplas funções em um único dispositivo. Pequeno no tamanho, mas poderoso em funcionalidade.
● Uma garra elétrica com servomotor pequeno, porém potente.
●Os terminais podem ser substituídos para atender a diferentes requisitos de projeto.
● Capaz de pegar objetos frágeis e deformáveis, como ovos, tubos de ensaio, anéis, etc.
● Adequado para locais sem fontes de ar (como laboratórios e hospitais).
O Z-EFG-R é uma pequena garra elétrica com sistema servo integrado, capaz de substituir bomba + filtro + válvula eletromagnética + válvula de aceleração + garra pneumática.
| Modelo nº Z-EFG-R | Parâmetros |
| AVC total | 20 mm |
| força de preensão | 80N |
| Repetibilidade | ±0,02 mm |
| Peso de preensão recomendado | 0,8 kg |
| Modo de transmissão | Cremalheira + Guia de roletes transversais |
| Reposição de graxa em componentes móveis | A cada seis meses ou 1 milhão de movimentos/tempo |
| tempo de movimento de batimento unidirecional | 0,45s |
| Faixa de temperatura operacional | 5-55℃ |
| Faixa de umidade operacional | RH35-80 (Sem geada) |
| Modo de movimento | Dois dedos se movem horizontalmente |
| Controle de AVC | Ajustável |
| Ajuste da força de fixação | Ajustável |
| Peso | 0,5 kg |
| Dimensões (C*L*A) | 68*68*132,7 mm |
| Posicionamento do controlador | Embutido |
| Poder | 5W |
| Tipo de motor | DC sem escovas |
| Tensão nominal | 24V |
| Corrente de pico | 1A |
| Braço robótico adaptável de seis eixos | UR, Aubo |
O sistema de condução e o controlador são integrados.
O Z-EFG-R é uma pequena garra elétrica com sistema servo integrado, capaz de substituir bomba de ar + filtro + válvula eletromagnética + válvula de aceleração + garra pneumática.


Compatível com braço robótico de seis eixos
A garra é compatível com os principais braços robóticos de seis eixos, permitindo uma instalação plug and play. Possui um curso de 20 mm, força de fixação de 80 N e seu curso e força de fixação podem ser ajustados.
Figura pequena, fácil de instalar
O Z-EFG-R tem dimensões de 68 mm (comprimento) x 68 mm (largura) x 132,7 mm (altura), estrutura compacta, suporta múltiplos métodos de instalação, possui controlador integrado, ocupa pouco espaço e é fácil de aplicar em diversas tarefas de fixação.

Reação rápida, controle preciso
O tempo de movimento mais curto de um único curso é de 0,45s, sua repetibilidade é de ±0,02mm, sua extremidade pode ser trocada facilmente e os clientes podem fixar o objeto conforme solicitado.
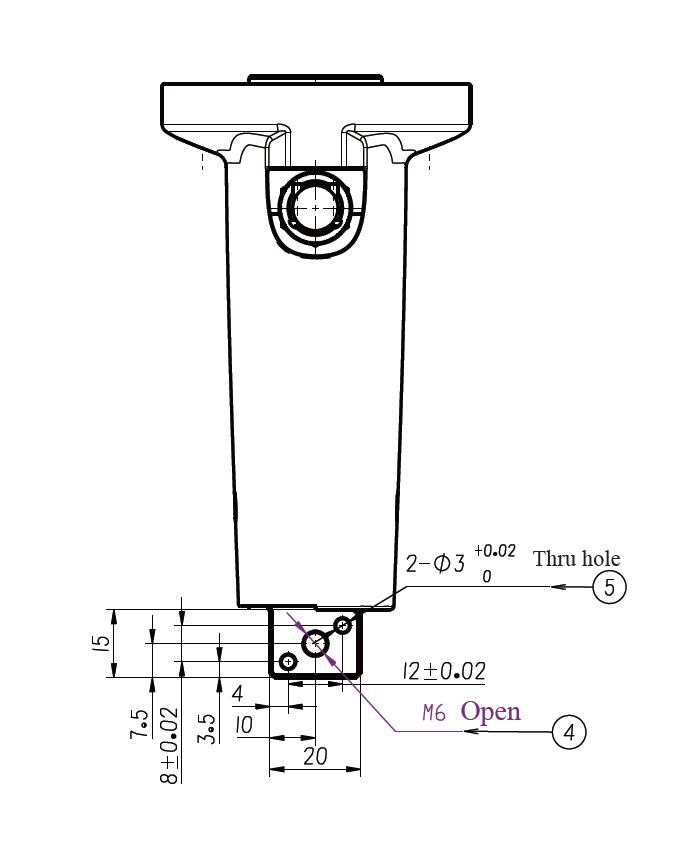
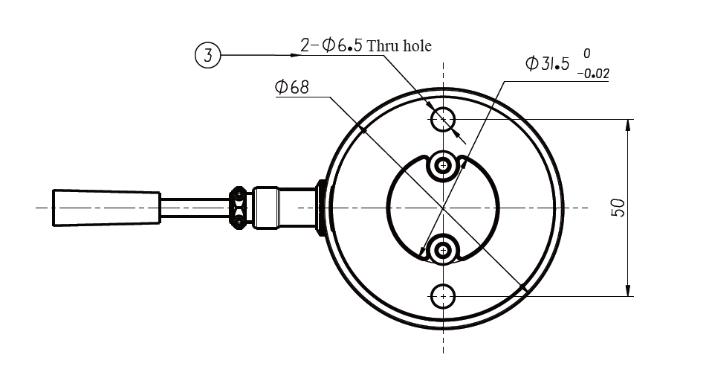
Diagrama de Instalação Dimensional
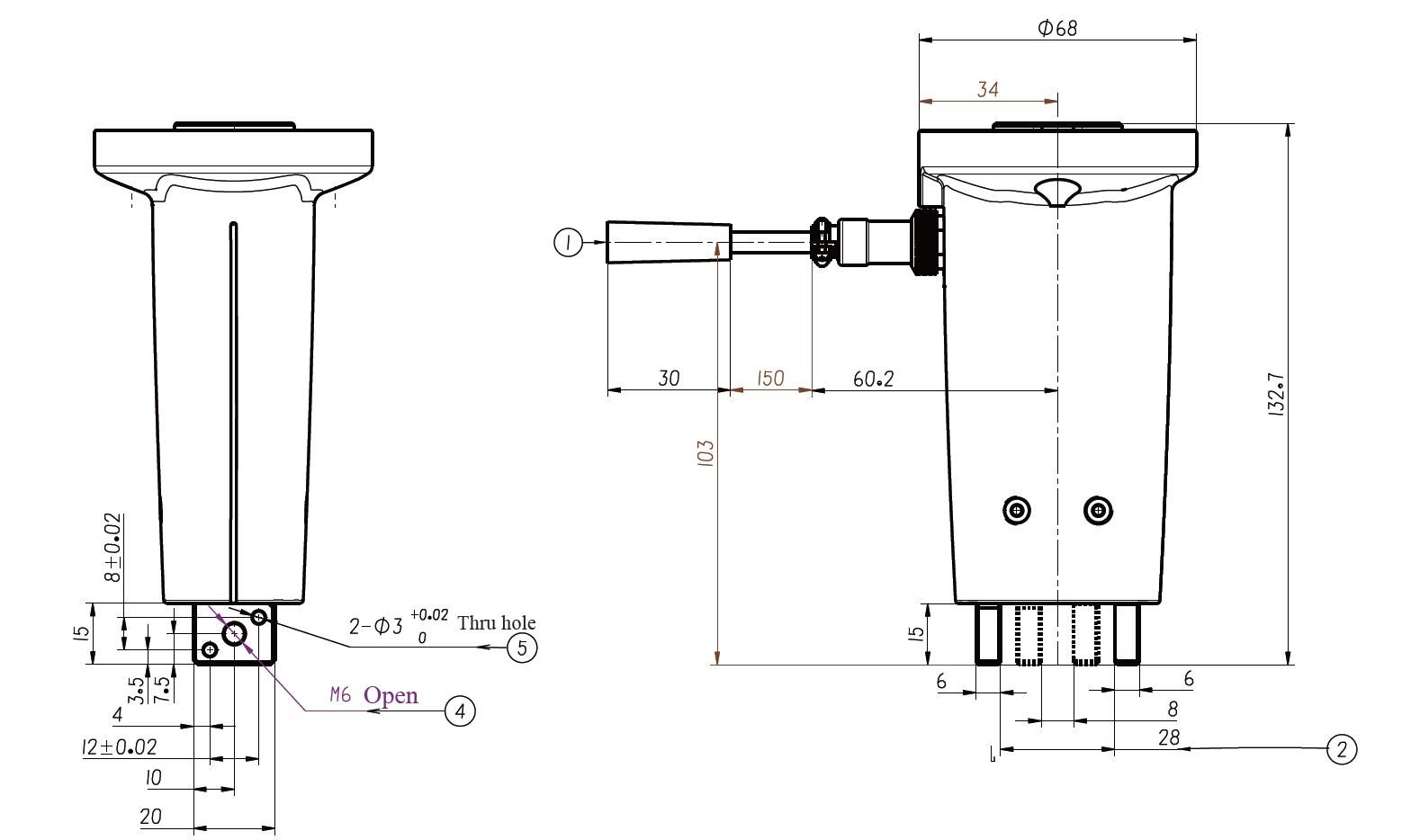
① RKMV8-354 Conector de aviação de cinco pinos para RKMV8-354
② O curso da garra elétrica é de 20 mm
③ Posição de instalação: utilize dois parafusos M6 para conectar com o flange na extremidade do braço robótico UR.
④ Posição de instalação, posição de instalação da luminária (parafuso M6)
⑤ Posição de instalação, posição de instalação da luminária (3 furos cilíndricos para pinos)
Parâmetros Elétricos
Tensão nominal 24±2V
Corrente 0,4A

Nosso negócio







