Série de garras elétricas HITBOT – Z-EFG-26 Garra elétrica paralela



Categoria principal
Braço robótico industrial / Braço robótico colaborativo / Garra elétrica / Atuador inteligente / Soluções de automação
Aplicativo
As garras robóticas da série Z-EFG da SCIC são compactas e possuem um sistema servo integrado, o que permite um controle preciso de velocidade, posição e força de fixação. O sistema de garras de última geração da SCIC para soluções de automação abrirá novas possibilidades para automatizar tarefas que você jamais imaginou serem possíveis.

Recurso
• Detecção de queda por garra, função de saída de área
• A força, a posição e a velocidade podem ser controladas com precisão através do Modbus.
• Longa vida útil: dezenas de milhões de ciclos, superando as garras de ar.
Controlador integrado: tamanho compacto, fácil integração.
• Modo de controle: 485 (Modbus RTU), E/S
A força de fixação e a velocidade podem ser controladas com precisão por meio do Modbus.
Aplicação múltipla
Possui detecção de gotas com fixação e saída para distritos.
Precisão no controle
A força de aperto, a broca e a velocidade podem ser controladas por Modbus.
Longa vida
Dez milhões de ciclos, garra aérea
Controlador integrado
Ocupando pouco espaço, é fácil de integrar.
Reação rápida
O menor tempo de um único golpe é de apenas 0,25s.
Fixação suave
Pode prender objetos frágeis, como ovos, copos de vidro, etc.




Parâmetro de especificação
O Z-EFG-26 é uma garra paralela elétrica de 2 dedos, pequena em tamanho, mas poderosa para agarrar diversos objetos macios, como ovos, tubos, componentes eletrônicos, etc.
● A garra elétrica Z-EFG-26 possui um controlador integrado.
●Seu curso e força de preensão são ajustáveis.
●Os terminais podem ser substituídos para se adaptarem a diversas necessidades.
●Permite pegar com facilidade objetos frágeis e deformáveis, como ovos, tubos de ensaio, anéis, etc.
●Adequado para ambientes sem fontes de ar (como laboratórios e hospitais).
| Modelo nº Z-EFG-26 | Parâmetros |
| Total AVC | 26 mm |
| força de preensão | 6~15N |
| Repetibilidade | ±0,02 mm |
| Peso de preensão recomendado | Máx. 0,3 kg |
| Transmissão modo | Cremalheira + Guia de roletes transversais |
| Reposição de graxa em componentes móveis | A cada seis meses ou 1 milhão de movimentos/tempo |
| tempo de movimento de batimento unidirecional | 0,25s |
| Faixa de temperatura operacional | 5-55℃ |
| Faixa de umidade operacional | RH35-80(Sem geada) |
| Modo de movimento | Dois dedos se movem horizontalmente |
| Controle de AVC | Ajustável |
| Ajuste da força de fixação | Ajustável |
| Peso | 0,45 kg |
| Dimensões(C*L*A) | 55*26*97mm |
| Posicionamento do controlador | Embutido |
| Poder | 10W |
| Tipo de motor | DC sem escovas |
| Corrente de pico | 1A |
| Tensão nominal | 24V |
| Corrente de espera | 0,4A |
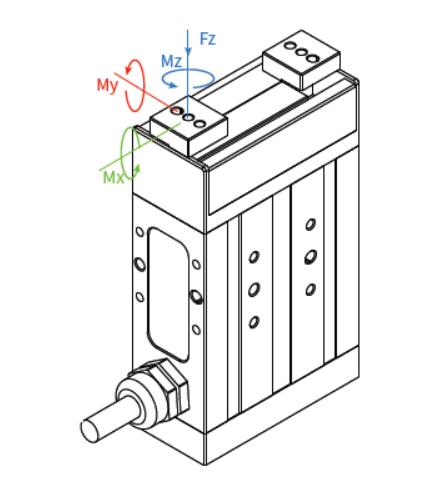
| Carga estática admissível na direção vertical | |
| Fz: | 250N |
| Torque admissível | |
| Mx: | 2,4 Nm |
| Meu: | 2,6 Nm |
| Mz: | 2 Nm |
Controle de força preciso, exatidão para repetição.

A garra elétrica adota um design de transmissão especial e um cálculo de acionamento para compensação; seu curso total é de 26 mm, a força de fixação é de 6 a 15 N, o curso e a força de fixação podem ser ajustados e sua repetibilidade é de ±0,02 mm.
Reação rápida, mais estável

O tempo mínimo de um único golpe é de apenas 0,25s, o que atende aos requisitos de fixação rápida e estável para linhas de produção.
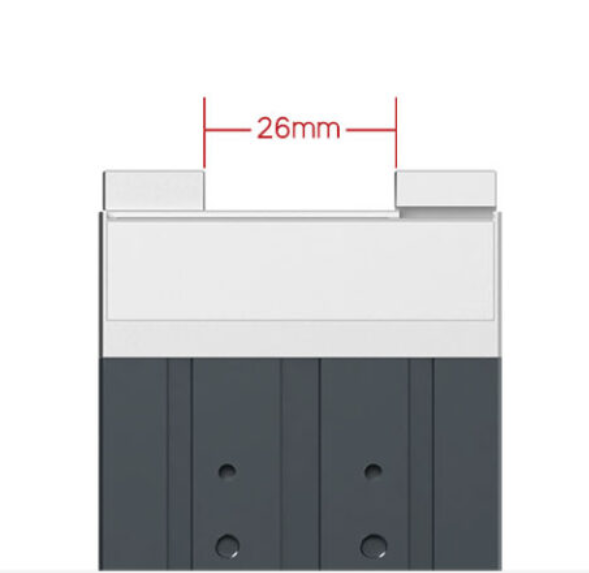
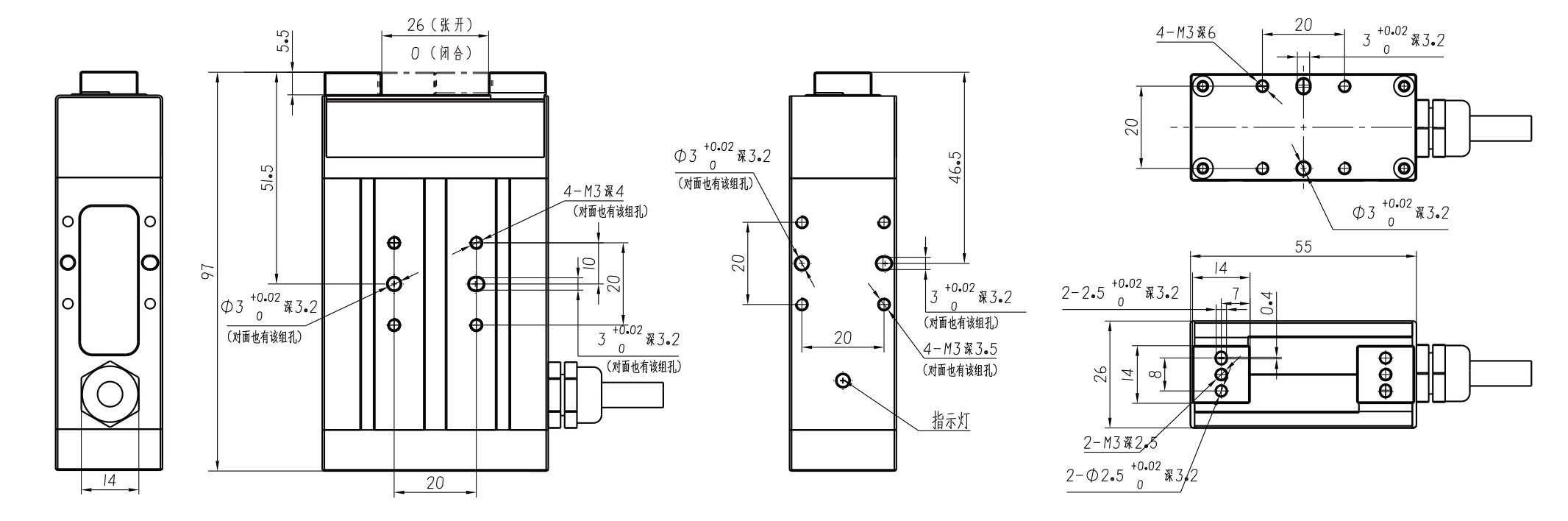
Figura pequena, fácil de integrar

O Z-EFG-26 tem dimensões de 55 mm (comprimento) x 26 mm (largura) x 97 mm (altura), estrutura compacta, suporta mais de cinco modos de instalação flexíveis, possui controlador integrado, ocupa pouco espaço e facilita o atendimento a diversas necessidades de fixação.

Acionamento e controlador integrados com fixação suave

A parte traseira da garra elétrica pode ser facilmente trocada, sua capacidade de preensão é de 300g, e os clientes podem projetar a parte traseira da garra de acordo com suas necessidades específicas de fixação, garantindo que a garra elétrica execute as tarefas de fixação com a máxima eficiência.
Múltiplos modos de controle, fáceis de operar.

A configuração da garra Z-EFG-26 é simples e possui diversos modos de controle: 485 (Modbus RTU), pulso e E/S, sendo compatível com sistemas de controle PLC.

Diagrama de Instalação Dimensional
Nosso negócio







